|
|||||||||||||||||||||||
|
|
|||||||||||||||||||||||
       |
Regular Articles Vol. 21, No. 12, pp. 43–49, Dec. 2023. https://doi.org/10.53829/ntr202312ra2 Low-latency Function-dedicated Network Providing Sustained and Stable ServicesAbstractNTT is investigating a function-dedicated network (FDN), which consists of a combination of optical and wireless networks with edge computing, to provide services meeting various network requirements simultaneously on the same infrastructure. NTT Access Network Service Systems Laboratories has been researching and developing a low-latency FDN to achieve continuous and stable service provision by meeting the service-performance requirements of low latency and low jitter. This article provides an overview and features of our low-latency FDN. Keywords: low latency, stability, edge computing
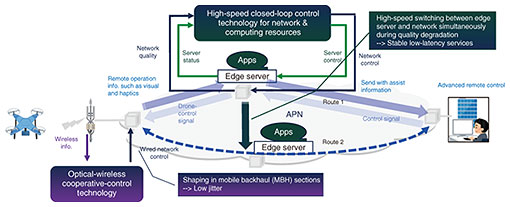
1. Introduction1.1 Low latency and stability of communication servicesIn March 2023, the NTT Group began offering the All-Photonics Network (APN) Innovative Optical and Wireless Network (IOWN) 1.0 service as a first release of IOWN, which is the next-generation communication infrastructure promoted by the NTT Group. By providing the APN, which exclusively uses the optical wavelength in all sections of the network, low latency and low jitter will be achieved, and advanced remote work, such as remote surgery, remote ensemble, and remote control, will become possible. For remote control to become widespread, it is necessary to shorten the end-to-end (E2E) latency from the operator terminal to the controlled device and reduce the latency and jitter not only in the optical-network section but also in the radio section. Remote control with high accuracy requires sensitive operation, and there is a considerable possibility that mis-operation may lead to a serious accident. Therefore, it is necessary to provide a stable E2E communication service by handling device outage and high-loaded processing. In remote surgery, for example, the guidelines prepared by the Japan Surgical Society indicate performance requirements of the communication environment such as latency and stability [1]. 1.2 Added value for remote control using edge computingCommunication services have traditionally been required to connect separate sites and provide low latency and high bandwidth with low error. The APN is important for achieving this. Our low-latency function-dedicated network (FDN) includes the APN and a wireless network as well as computing resources, which enable data transmission from the data source to the destination via computing resources with data processing [2]. Our low-latency FDN provides specific communication services to users by executing appropriate data processing and controlling E2E service quality in accordance with service-performance requirements. For remote control, it is possible to enhance controllability by assisting the operator. For example, augmented reality images, such as of the operation procedure or details, and alarm notifications, can be displayed to the operator, enabling smooth operation. 2. Low-latency FDNOur low-latency FDN monitors the total transmission time of the network and processing time of edge computing, always maintains low latency and low jitter according to service-performance requirements, and provides continuous and stable communication services [3]. The following are the elemental technologies of our low-latency FDN (Fig. 1). (1) Optical-wireless cooperative-control technology: Technology for advanced network control by having wireless and wired sections cooperate to achieve stricter service-performance requirements. (2) High-speed closed-loop control technology for network & computing resources: Control E2E latency to always meet service-performance requirements to ensure service stability.
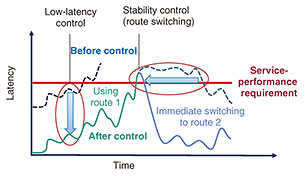
Figure 2 shows the difference between low latency and stability. Current low-latency technologies shorten the latency during normal operation and lower the dotted line of the graph shown in the figure. An example is lower-transmission-delay technology such as the APN or rapid processing of edge computing. Stability, on the other hand, means quickly returning communication service to normal by switching over the route including network and computing resources when quality degradation occurs due to failure, overload, etc. and shortening the time in which service-performance requirements are not met. It moves the dotted line to the left in the graph in the figure.
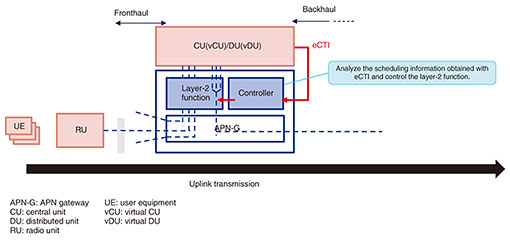
3. Optical-wireless cooperative-control technologyOur low-latency FDN will meet the service-performance requirements of low latency, low jitter, and stability for E2E services including a wireless section. A mobile system that provides wireless connection uses a wired network as a transport network for connection between base stations and the core network. However, mobile systems and transport networks have been designed, constructed, and operated separately and have not been integrated so that the transport network cannot be operated in accordance with the state of the mobile system. Cooperative dynamic bandwidth allocation (CO-DBA) and cooperative transport interface (CTI), which have been studied for mobile application of optical-access systems, are being investigated to enable a mobile system to cooperate with a transport network. When using optical-access systems as transport networks for mobile systems, it is necessary to reduce the latency of the optical-access system because the latency allowed by the mobile system is very short. Therefore, CO-DBA, a function to reduce latency by determining the data-transmission time of optical-access systems in cooperation with mobile systems, was incorporated into the International Telecommunication Union - Telecommunication Standardization Sector (ITU-T) G.989 series of recommendations [4] that defines Next Generation Passive Optical Network 2 (NG-PON2) and the ITU-T G.9804 series of recommendations [5] that defines Higher Speed PON. The interface between a mobile system and optical-access system for exchanging information necessary for CO-DBA operation was also specified as CTI in the Open Radio Access Network (O-RAN) Working Group (WG) 4 [6]. We are investigating Extended CTI (eCTI) to satisfy the strict service-performance requirements required for future networks by enabling cooperation between mobile systems and optical-access systems achieved with CTI (Fig. 3).
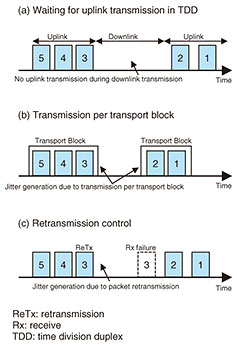
When implementing high-precision remote control and automatic operation of robots, it is necessary to reduce jitter, which has not been specified as a performance requirement in conventional networks, within a certain time because stable control becomes difficult when packet-arrival-time fluctuations are large. The APN, which is a component of IOWN, achieves low latency and low jitter by transmitting as much of the wired section as possible in the optical state. As shown in Fig. 4, the packet-transmission interval in the radio section varies due to the transmission-waiting time and retransmission control.
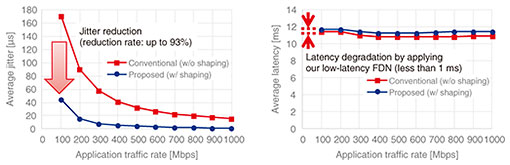
The optical-wireless cooperative-control technology enables various performance improvements through the cooperation of wireless and wired sections. We have shown that jitter can be suppressed by up to 93% with this technology [7] (Fig. 5) by sharing information on transmission timing and transmission amount in the wireless section from the mobile system to transport network, analyzing this information, and controlling the equipment that constitutes the transport network.
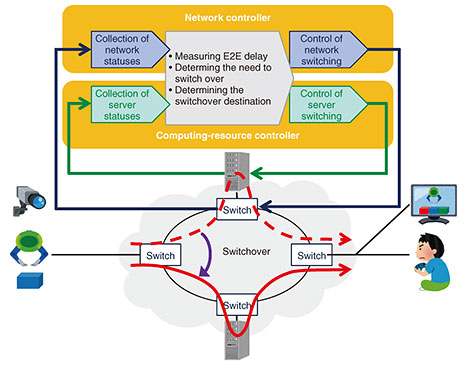
This technology is under discussion as a work item of the IOWN Global Forum and is described in the technical document published by the Forum [8]. 4. High-speed closed-loop control technology for network & computing resourcesEven when communication services combining network and edge computing are provided, quality control is carried out in both network and edge computing separately. Therefore, quality degradation of services, which does not have a critical degradation point, cannot be detected and might continue to degrade. To solve this problem, we are researching and developing a high-speed closed-loop control technology for network & computing resources that enables the network and server to cooperate (Fig. 6). This technology is made possible by rapidly automating three elements: (1) collection of network information and computing-resource information, (2) analysis of the collected information, and (3) control in the event of quality degradation by having the network controller and computing-resource controller cooperate.
4.1 Accelerated collection, analysis, and control and cooperation of controllersBy executing the collection, analysis, and control cycle from the occurrence of degradation to the completion of the action at high speed, the service provider can recover quality degradation in a short time. (1) Collection: Collect network-latency information by using high-speed telemetry and computing-resource processing time by analyzing data before and after processing using edge computing to calculate E2E latency. (2) Analysis: Determine if the E2E latency meets the service-performance requirements, and if not, determine the need to switch over to an alternate route. When switching, the system determines the switching destination after confirming that the latency satisfies the service-performance requirements in consideration of the new route of the network and computing resources. (3) Control: Switch the network and computing resources to a determined destination. The switch timing is controlled to minimize the impact on the service. For collection, analysis, and control, the network controller and computing-resource controller must cooperate. During collection, cooperation is needed to calculate E2E latency, and during analysis, cooperation is needed to discover and calculate the new available resources of network and computing that meet the service-performance requirements. During control, cooperation is needed when the switching time is adjusted. We implemented our low-latency FDN with devices such as optical switches and servers and confirmed that the collection, analysis, and control time related to switching was kept within 90 ms [9]. 4.2 Demonstration of remote controlTo confirm the effectiveness of our low-latency FDN, we deployed a display and robot operation equipment at the NTT Musashino R&D Center and a robot arm and edge server at the NTT Yokosuka R&D Center and constructed an experimental network for remote control by connecting the two sites with approximately 150 km of optical fiber [10] (Fig. 7). At the site with the robot arm, there was a network camera and haptics sensor, and the haptics information was converted into visual information on the edge server. The operator controlled the robot arm remotely through visualization of the haptic information (Fig. 7).
When the remote-control environment deteriorated due to overloading of the edge server, remote control became difficult in the conventional configuration without our low-latency FDN. However, with our FDN, remote control could be executed without incident by completing switching control about 100 ms after quality deterioration and by transmitting haptics information. Therefore, the effectiveness of our low-latency FDN was confirmed. 5. Future outlookThis article introduced our low-latency FDN, which provides continuous and stable service by meeting the service-performance requirements of low latency and low jitter, and its demonstration experiment. We will further reduce the latency of the wireless section and provide E2E stability by using eCTI to take into account the traffic characteristics of the wireless section. References
|
||||||||||||||||||||||